
Наіт Буда Аніс Мунірович
студент
НТУУ “Київський політехнічний інститут імені Ігоря Сікорського”
місто Київ, Україна
Анотація: запропоновано вимірювальний канал з віддаленою передачею розміру довжини з використанням частоти як проміжної величини, що може бути використана при побудові систем інтернет-калібрування.
Ключові слова: калібрування, повірка, інтернет-метрологія, частота, простежуваність.
На сьогоднішній день набувають поширення системи інтернет-калібрування, принцип роботи яких базується на віддаленій передачі еталонних величин, що зіграло важливу роль у розвитку інтернет-метрології. Це дозволяє спростити забезпечення простежуваності на різних рівнях.
З цією тенденцією пов’язана необхідність створення еталонів, які забезпечують такий варіант передачі еталонної величини або сигналу. В такому випадку використовують стандарти одиниць фізичних величин, які можна перетворити на частотні сигнали (частота як проміжна фізична величина, що може передаватися, наприклад, з використанням системи GPS). До фізичних величин, які дозволяють формувати проміжні частотні сигнали відносять: час, напругу, довжину, безпосередньо частоту тощо [1].
Зважаючи на те, що найбільш зручною для віддаленої передачі є частота, в статті [2] запропонована схема передачі деякої величини X з перетворенням її на частоту та подальшим кодуванням. При цьому можливі 3 варіанти реалізації такої схеми: автогенераторні датчики, що включають один автогенератор; два автогенератора - вимірювальний і компенсаційний та два вимірювальних автогенератора, чутливі елементи яких з'єднаними за дифференційною схемою.
Для створення вимірювального каналу з віддаленою передачею розміру довжини для систем інтернет-калібрування використовуємо LC-автогенератор, до якого підключено ємнісний чутливий елемент.
Тоді структурна схема набуває вигляду – рисунок 1.
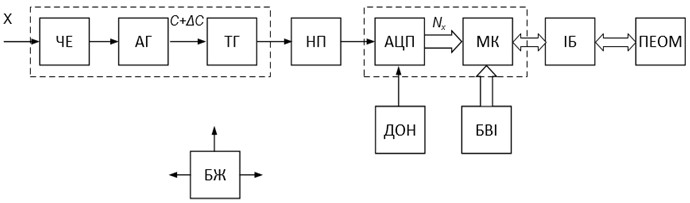
Рисунок 1 – Схема вимірювального каналу з віддаленою передачею розміру довжини для систем інтернет-калібрування.
На схемі позначено: ЧЕ – чутливий елемент; АГ – автогенератор; ТГ – тригер; НП – нормуючий пристрій; АЦП – аналого-цифровий перетворювач; ДОН – джерело опорної напруги; МК – мікроконтроллер; БВІ – блок введення іформації; ІБ – інтерфейсний блок; ПЕОМ – персональна електронно-обчислювальна машина; БЖ – блок живлення.
Перетворення сигналу за схемою, наведеною на рис.1, відбувається наступним чином.
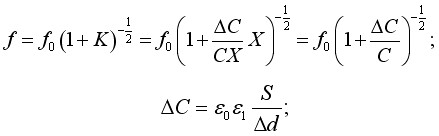
За відсутності на вході датчика вимірюваної величини (X=0) ємність чутливого елементу дорівнює початковій (C1=C). При цьому вимірювальний автогенератор генерує сигнал з частотою: ![]() . При зміні вимірюваної величини на ΔX змінюється значення ємності чутливого елемента на ΔC і автогенератор генерує сигнал з частотою:
. При зміні вимірюваної величини на ΔX змінюється значення ємності чутливого елемента на ΔC і автогенератор генерує сигнал з частотою:

де K=ΔC/CX - коефіцієнт перетворення чутливого елемента.
Отже характеристика перетворення такого датчика має наступний вигляд:
![]()
В якості давача використано ємнісний датчик переміщення. Отже вхідною величиною X є переміщення d, яке пов'язано з ємністю за наступною формулою:
![]()
де ε0 – діелектрична стала; ε - є діелектричної проникністю матеріалу; d – зазор; S - площа пластин.
Таким чином, функція перетворення фізичної величини d на частотний сигнал f матиме такий вигляд:
де ![]()
dпоч – початкова відстань між пластинами ємнісного датчика;
dнов – поточна відстань між пластинами.
Тоді
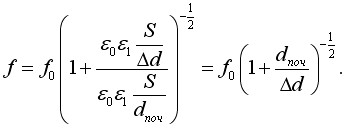
Таким чином встановлюючи фіксовану різницю між кінцевим та початковим положенням пластин можна задати розмір потрібної еталонної довжини, яка за допомогою ємнісного давача і автогенератора перетворюється на частотний сигнал. Цей частотний сигнал може бути переданий у віддалену лабораторію за допомогою відомих способів передачі сигналу частоти.
Крім того частотний сигнал може бути закодований і переданий за допомогою дротових або бездротових ліній зв’язку, наприклад, за допомогою мережі інтернет, оптичних ліній зв’язку тощо.
Здійснення кодування за наведеною схемою описано в статті [2]. При цьому вихідний сигнал автогенератора подається на кодуючий пристрій, де перетворюється на цифровий код.
Код, що відповідає початковому значенню вимірюваної величини (початкове положення пластин ємнісного давача dпоч) відповідає коду N0, що визначається за формулою:

яке зберігається в оперативній пам'яті МК.
Код, що відповідає кінцевому значенню вимірюваної величини (кінцеве положення пластин ємнісного давача dнов) відповідає коду N1, що визначається за формулою:

яке також зберігається в оперативній пам’яті МК.
Далі в обчислювальному блоці МК відбувається формування вихідного сигналу вимірювального перетворювача у вигляді числового коду наступним чином:
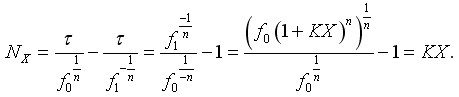
Для ємнісного давача переміщення попередній вираз набуває вигляду:
Таким чином, запропонована схема дозволяє реалізувати перетворення малих розмірів довжини на частотний сигнал з подальшою передачею у віддалену лабораторію або її кодування та передачу через дротові та бездротові мережі, що дозволяє реалізувати популярне на сьогоднішній день в розвинених країнах інтернет-калібрування.
Література:
1. Software Support for Metrology: GPG 19 – Internet-enabled Metrology Systems (NPL Report DEM-ES 012), June 2006.
2. Кондрашов С.И., Гусельников А.В. Метод постороения универсальных преобразователей физических величин с частотным представлением измерительной информации // Український метрологічний журнал, 2011, №2.