
Зволікевич Андрій Валерійович
студент Кафедри Технічної Кібернетики
Національний технічний університет України
«Київський політехнічний інститут імені Ігоря Сікорського»
Україна, м.Київ
Анотація: в даній роботі наведено порівняльний аналіз найпоширеніших протоколів передачі даних, які використовуються для керування промисловою автоматикою, а також надано рекомендації для вибору підходящого протоколу.
Ключові слова: РОЗПОДІЛЕНА СИСТЕМА УПРАВЛІННЯ, МІКРОКОНТРОЛЕР, ПРОТОКОЛ ПЕРЕДАЧІ ДАНИХ, АВТОМАТИЗАЦІЯ ВИРОБНИЦТВА, ПРОГРАМУВАННЯ
У зв'язку з різким здешевленням мікропроцесорної техніки з одночасним підвищенням їх надійності та технічних характеристик, зменшенням їх розмірів і збільшенням їх функціональних можливостей з'явилася велика кількість малогабаритних контролерів і мікрокомп'ютерів. Наявність розвинених засобів передачі інформації дозволяє пов'язувати ці контролери в єдину мережу, причому різні вузли цієї мережі можуть знаходитися на досить великій відстані один від одного.
Подібна архітектура системи управління має такі переваги:
1) Висока надійність роботи системи. Чіткий розподіл обов'язків для кожного окремого вузла системи робить її працездатною навіть при виході з ладу або зависання будь-якого пристрою.
2) Мала кількість дротових з'єднань. Контролери мають можливість працювати в важких промислових умовах, тому вони, як правило, встановлюються в безпосередній близькості до об'єкту управління.
3) Легка розширюваність системи. При появі у системі додаткових точок які необхідно контролювати досить додати до системи новий вузол.
4) Відносно невеликі терміни проведення модернізації.
5) Можливість використання комп'ютерів і контролерів меншої потужності. Оскільки кожен вузол виконує лише одну окрему задачу, відпадає необхідність у дорогих обчислювачах.
6) Легкість тестування і налагодження. Оскільки всі елементи системи активні, легко забезпечити самодіагностику і пошук несправності.
Необхідність модернізації інтерфейсів управління пов'язана в першу чергу з необхідністю підвищення функціональності пристроїв, які входять у систему разом зі скороченням витрат на монтаж та експлуатацію. Звичайний спосіб зв'язку у розподіленій системі управління за допомогою аналогових уніфікованих електричних сигналів все ще активно застосовується, але до деяких об'єктів його можливостей вже недостатньо.
У зв'язку з цим останнім часом популярності набуває з'єднання по польовій шині, яке дозволяє передавати керуючі команди, запити стану, сигнали зворотного зв'язку та іншу інформацію в цифровому вигляді, в тому числі використовуючи існуючі лінії зв'язку. При цьому можуть застосовуватися різні протоколи обміну даними. Проте, проблема у застосуванні такого підходу полягає у тому, що при збільшенні швидкості передачі інформації значно зменшується максимальна відстань між вузлами мережі(Мал.1).
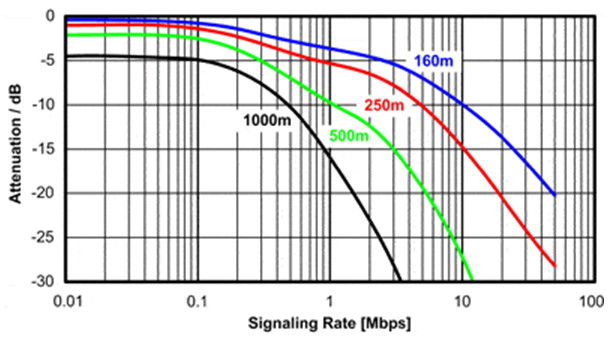
Мал.1 Залежність затухання корисного сигналу від швидкості передачі даних на різних відстанях(RS-485) [1]
Найпоширенішими протоколами передачі даних у промисловій автоматиці є:
1) PROFIBUS (PROcess FIeld BUS) - це відкрита промислова мережа польового рівня, що відповідає вимогам міжнародних стандартів IEC 61 158 / EN 50170, призначена для побудови систем розподіленого вводу-виводу, а також організації обміну даними між системами автоматизації[2].
2)Modbus - комунікаційний протокол, заснований на технології ведучий-керований (master-slave). Широко застосовується в промисловості для організації зв'язку між електронними пристроями. Використовується в основному для передачі даних через послідовні лінії зв'язку RS-485, RS-422, RS-232, є також модифікація для мережі TCP/IP (Modbus TCP )[3].
3)Технологія Foundation Fieldbus є цифровою, послідовною, двосторонньою системою зв'язку, яка служить в якості базового рівня мережі в заводських або фабричних системах автоматизації. Це відкрита архітектура, розробляється і здійснюється організацією Foundation Fieldbus.
4)HART-протокол — цифровий протокол передачі даних у промислових мережах розроблений фірмою Rosemount Fischer (США) в середині 80-х років. З 90-х років він був доопрацьований і став загальновизнаним відкритим стандартом комунікації, що дозволяє обмінюватися інформацією між інтелектуальними давачами та приладами[4].
5)Controller Area Network (CAN) — стандарт, призначений для організації високонадійних та недорогих каналів зв'язку у розподілених системах управління. CAN застосовується у пристроях промислової автоматики, вбудованих пристроях технології «розумного будинку», автомобільній промисловості та інших галузях. Найчастіше CAN-інтерфейс використовується як зв'язна ланка між головним контролером та багатьма допоміжними датчиками, механізмами та актуаторами, підключення яких до центральної магістралі не завжди доцільне[5].
Для того, щоб обрати найкращий протокол передачі даних, складемо порівняльну таблицю їхніх характеристик(Таблиця 1).
Таблиця №1
|
Протоколи |
Максимальна швидкість |
Максимальна кількість пристроїв на одній шині |
Максимальна довжина кабелю |
|
Profibus |
12 Мбіт/с |
126 |
100 м |
|
Modbus |
115,2 кбіт/с |
247 |
1,2 км |
|
Foundation Fieldbus |
31,25 кбіт/с |
32 |
1,9 км |
|
HART |
1,2 кбіт/с |
15 |
3 км |
|
CAN |
1 Мбіт/с |
30 |
25 м |
Як видно з таблиці, не існує такого протоколу який був би найкращим одночасно за усіма параметрами. Якщо протокол підтримує дуже високу швидкість передачі даних (пропускну здатність), то, як правило, він не спроможний передати такий сигнал на досить велику відстань. І навпаки, якщо протокол здатен передати інформаційні пакети на дуже велику відстань, то він це робить за рахунок програшу у кількості підтримуваних пристроїв на одній шині та відчутно низькій максимальній швидкості. Це означає, що вибір кращого протоколу передачі даних між пристроями у промисловій автоматиці залежить від конкретної ситуації. Якщо максимальна відстань від головного до керованих пристроїв знаходиться у межах до 300 м, тоді одним з найкращих варіантів стане Profibus, однак якщо відстань перевищує 300 м, тоді Modbus стане у нагоді. Не слід забувати про максимальну кількість пристроїв на одній шині. Наприклад, якщо керованих пристроїв більше 50, тоді буде доволі складно об'єднати їх у єдину систему за допомогою Foundation Fieldbus, HART та CAN.
Література:
1. https://www.eetimes.com/increasing-rs-485-networking-via-receiver-equalization/#
2. https://uk.wikipedia.org/wiki/Profibus
3. https://uk.wikipedia.org/wiki/Modbus
4. https://uk.wikipedia.org/wiki/HART-%D0%BF%D1%80%D0%BE%D1%82%D0%BE%D0%BA%D0%BE%D0%BB
5. https://uk.wikipedia.org/wiki/Controller_Area_Network