
Морозова Мария Николаевна,
кандидат технических наук,
НТУУ «КПИ им. Игоря Сикорского»,
Украина, г. Киев
Аннотация: Принцип действия индуктивных датчиков состоит в преобразовании величины измеряемого размера в полное сопротивление катушки индуктивности. Датчик представляет собой катушку индуктивности или взаимной индуктивности того или иного вида.
Наиболее часто в качестве датчиков размера используются катушки индуктивности с ферромагнитными сердечниками. Индуктивность такой катушки при малых величинах немагнитных зазоров в магнитопроводе описывается формулой:
 ,
,
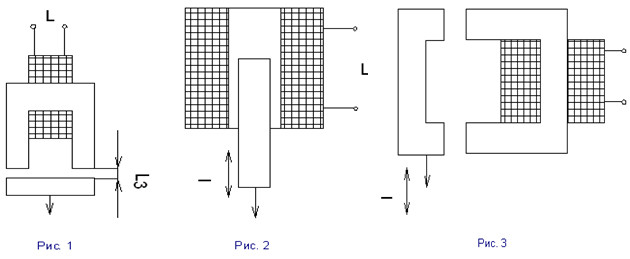
где µ0 - магнитная постоянная; ω - число витков катушки; lc , Sc , µc - длина, площадь сечения и относительная магнитная проницаемость участков ферромагнитного сердечника соответственно; l3 , S3 - длина и площадь немагнитных зазоров в сердечнике. Из этой формулы следует, что при изменении длины l3 или площади S3 немагнитных зазоров в сердечнике изменяется индуктивность катушки. Этот принцип используется в индуктивных датчиках с переменным зазором и переменной площадью. Пусть с изменением измеряемого размера связано изменение длины немагнитного зазора l3 (рис. 1). В этом случае произойдет относительное изменение индуктивности L :
Поскольку для катушки с сердечником 
С помощью электрических методов можно измерить ![]() , что эквивалентно относительному изменению
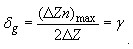
, что эквивалентно относительному изменению ![]() . На рис. 1 и рис. 3 приведены схемы контактного датчика размера с катушкой индуктивности, имеющей ферромагнитный сердечник. Сердечник катушки разделен на две части - неподвижную, называемую собственно сердечником и несущую катушку индуктивности, и подвижную, закрепленную на измерительном стержне и называемую якорем. Изменение размеров детали или ее перемещение приводит к перемещению якоря относительно сердечника и к изменению немагнитного зазора в магнитопроводе катушки. Последнее вызывает изменение индуктивности катушки и, следовательно, изменение полного сопротивления:
. На рис. 1 и рис. 3 приведены схемы контактного датчика размера с катушкой индуктивности, имеющей ферромагнитный сердечник. Сердечник катушки разделен на две части - неподвижную, называемую собственно сердечником и несущую катушку индуктивности, и подвижную, закрепленную на измерительном стержне и называемую якорем. Изменение размеров детали или ее перемещение приводит к перемещению якоря относительно сердечника и к изменению немагнитного зазора в магнитопроводе катушки. Последнее вызывает изменение индуктивности катушки и, следовательно, изменение полного сопротивления:
![]()
где Rn - активное сопротивление потерь катушки, ω - круговая частота питающего катушку тока. Модуль полного сопротивления катушки датчика по переменному току:
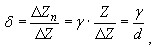
где ![]() - добротность индуктивного датчики. Можно построить и бесконтактный индуктивный датчик, используя схему, приведенную на рис. 1. В этом случае якорем служит сама контролируемая деталь, и через нее замыкается магнитный поток, создаваемый катушкой в сердечнике. Изменение размера детали ведет к изменению зазора l3 и к изменению индуктивности катушки L . По бесконтактной схеме можно контролировать как ферромагнитные, так и неферромагнитные металлические детали. В последнем случае датчик работает с использованием эффекта вихревых токов. Индуктивный датчик может быть построен по схеме с перемещением в магнитном поле катушки ферромагнитного разомкнутого сердечника (рис. 2). Такие датчики называют соленоидальными.
- добротность индуктивного датчики. Можно построить и бесконтактный индуктивный датчик, используя схему, приведенную на рис. 1. В этом случае якорем служит сама контролируемая деталь, и через нее замыкается магнитный поток, создаваемый катушкой в сердечнике. Изменение размера детали ведет к изменению зазора l3 и к изменению индуктивности катушки L . По бесконтактной схеме можно контролировать как ферромагнитные, так и неферромагнитные металлические детали. В последнем случае датчик работает с использованием эффекта вихревых токов. Индуктивный датчик может быть построен по схеме с перемещением в магнитном поле катушки ферромагнитного разомкнутого сердечника (рис. 2). Такие датчики называют соленоидальными.
По схеме построения датчики можно разделить на одинарные и дифференциальные (рис.4а,б). Одинарный датчик содержит одну измерительную ветвь, дифференциальный - две. В дифференциальном датчике при изменении измеряемого параметра одновременно изменяются индуктивности двух одинаковых катушек, причем изменение происходит на одну и ту же величину, но с обратным знаком (зеркально). При воздействии входной величины Δl полное сопротивление преобразователя получает приращение ΔZ . Однако величина Z зависит не только от входной величины l , но и от ряда других факторов, приводящих к изменению l и Q . Пусть суммарная относительная нестабильность полного сопротивления преобразователя под действием помех равно ϒc . В этом случае относительная погрешность преобразователя в диапазоне изменения входной величины D=Δl равна:
где ϒ - относительная нестабильность полного сопротивления преобразователя под действием помех; Z - полное сопротивление преобразователя; ΔZ - приращение полного сопротивления, соответствующее диапазону измерения Δl ; d - относительное изменение полного сопротивления в диапазоне измерения D . Так как всегда ΔZ<Z и d<l , то δ<γ . Следовательно, для одинарного индуктивного преобразователя относительная погрешность в рабочем диапазоне всегда больше относительной нестабильности его полного сопротивления под действием помех. Дифференциальный индуктивный преобразователь состоит из двух простых одинаковых преобразователей. Под действием входной величины Δl полное сопротивление обоих преобразователей Z1 и Z2 изменяется зеркально, т.е. на одну и ту же величину, но с разным знаком. Схема включения дифференциального преобразователя реагирует на алгебраическую разность Z1 - Z2 , за счет чего его чувствительность повышается в 2 раза по сравнению с одинарным. При идеальной симметрии дифференциального преобразователя его относительная погрешность в диапазоне D :
Реально дифференциальный преобразователь всегда обладает асимметрией, которая может выражаться в том, что: а) в нулевой точке Z1 ≠ Z2 ; б) чувствительность к входному перемещению у обеих половин преобразователя неодинакова; в) коэффициенты нестабильности у обеих половин преобразователя также неодинаковы. При рассмотрении зависимости погрешности дифференциального преобразователя от наличия асимметрии можно увидеть, что асимметрия вида а) и в) приводит к возрастанию погрешности преобразователя. Одновременное присутствие всех видов асимметрии приведет к тому, что относительная погрешность дифференциального преобразователя в диапазоне измерения D будет равна:
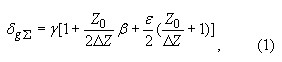
где Z0 - полное сопротивление каждой половины преобразователя при нулевом положении подвижного якоря; ΔZ - полное изменение полного сопротивления одной половины преобразователя, соответствующее диапазону измерения D ; ![]() - коэффициент асимметрии половин преобразователя при нулевом положении подвижного якоря (при этом предполагается
- коэффициент асимметрии половин преобразователя при нулевом положении подвижного якоря (при этом предполагается ![]() - коэффициент асимметрии показателей нестабильности половин преобразователя. Предполагается
- коэффициент асимметрии показателей нестабильности половин преобразователя. Предполагается ![]() . Из выражения (1) следует, что при наличии асимметрии у дифференциального преобразователя его погрешность увеличивается. В реальных конструкциях преобразователей асимметрия всегда имеет место и ориентировочно составляет в зависимости от тщательности исполнения и настройки преобразователя. Сравним одинарный и дифференциальный преобразователи при наличии у последнего асимметрии
. Из выражения (1) следует, что при наличии асимметрии у дифференциального преобразователя его погрешность увеличивается. В реальных конструкциях преобразователей асимметрия всегда имеет место и ориентировочно составляет в зависимости от тщательности исполнения и настройки преобразователя. Сравним одинарный и дифференциальный преобразователи при наличии у последнего асимметрии  . Пусть
. Пусть 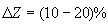 . Тогда
. Тогда  . Соотношение погрешностей
. Соотношение погрешностей  , т.е. выигрыш в точности у дифференциального преобразователя составляет раз. Этот выигрыш тем меньше, чем больше асимметрия.
, т.е. выигрыш в точности у дифференциального преобразователя составляет раз. Этот выигрыш тем меньше, чем больше асимметрия.
Рис. 4
Литература
1. Теория и расчет индуктивных датчиков перемещений для систем автоматического контроля: монография / А.В. Федотов. – Омск: Изд-во ОмГТУ, 2011.